
 Global Finds
Global Finds  Quick Commerce
Quick Commerce  Daily Bazar
Daily Bazar  Electronics & Appliances
Electronics & Appliances  Mother, Baby & Toys
Mother, Baby & Toys  Beauty
Beauty  Sports
Sports  Automotive
Automotive  Stationery, Books & Music
Stationery, Books & Music _20.png) Fashion Luxe
Fashion Luxe  Jersey
Jersey  Sports Shoes
Sports Shoes  Fashion
Fashion _20.jpeg) Home
Home  Garden & Pet Care
Garden & Pet Care  Special Weekly Offer
Special Weekly Offer  Grocery
Grocery  Global Finds
Global Finds  Quick Commerce
Quick Commerce  Daily Bazar
Daily Bazar  Electronics & Appliances
Electronics & Appliances  Mother, Baby & Toys
Mother, Baby & Toys  Beauty
Beauty  Sports
Sports  Automotive
Automotive  Stationery, Books & Music
Stationery, Books & Music _20.png) Fashion Luxe
Fashion Luxe  Jersey
Jersey  Sports Shoes
Sports Shoes  Fashion
Fashion _20.jpeg) Home
Home  Garden & Pet Care
Garden & Pet Care  Special Weekly Offer
Special Weekly Offer  Grocery
Grocery 

Description: HC-SR04 Ultrasonic Sonar Sensor
This is the HC-SR04 ultrasonic distance sensor. This economical sensor provides 2cm to 400cm of non-contact measurement functionality with a ranging accuracy that can reach up to 3mm. Each HC-SR04 module includes an ultrasonic transmitter, a receiver and a control circuit.
There are only four pins that you need to worry about on the HC-SR04: VCC (Power), Trig (Trigger), Echo (Receive), and GND (Ground). You will find this sensor very easy to set up and use for your next range-finding project!
- Range– This module can detect objects between 2cm and 500cm in front of itself with an angle of 15 degrees either side.
- Accuracy– The readings of the module can be broken down into 0.3cm increments, which is plenty for most robotics projects
- Mounting– Used by many makers, in many projects, the 4 holes on the circuit board make for easy mounting into your project
- Software– As a favorite distance sensor, there are plenty of libraries and examples available to use with Arduino, Micro:bit, Raspberry Pi and other maker platforms.
- Distance calculation– Once it’s wired up, you’ll use the formula: distance = (traveltime/2) x speed of sound for a measurement in centimeters
Features:
- Operating voltage: +5V
- Theoretical Measuring Distance: 2cm to 450cm
- Practical Measuring Distance: 2cm to 80cm
- Accuracy: 3mm
- Measuring angle covered: <15°
- Operating Current: <15mA
- Operating Frequency: 40Hz
Specification:
- Power Supply :+5V DC
- Working Current: 15mA
- Effectual Angle: < 15 degree
- Ranging Distance : 2cm – 400 cm/1 inch – 13ft
- Resolution : 0.3 cm
- Measuring Angle: 30 degree
- Trigger Input Pulse width: 10uS
How Does it Work?
The ultrasonic sensor uses sonar to determine the distance to an object. Here’s what happens:
- The transmitter (trig pin) sends a signal: a high-frequency sound.
- When the signal finds an object, it is reflected and…
- … the transmitter (echo pin) receives it.
The time between the transmission and reception of the signal allows us to calculate the distance to an object. This is possible because we know the sound’s velocity in the air.
Ultrasonic Sensor PinConfiguration:
Equivalent distance measuring Sensors
US transmitter Receiver pair, IR sensor module, IR sensor pair, IR Analog distance sensor,
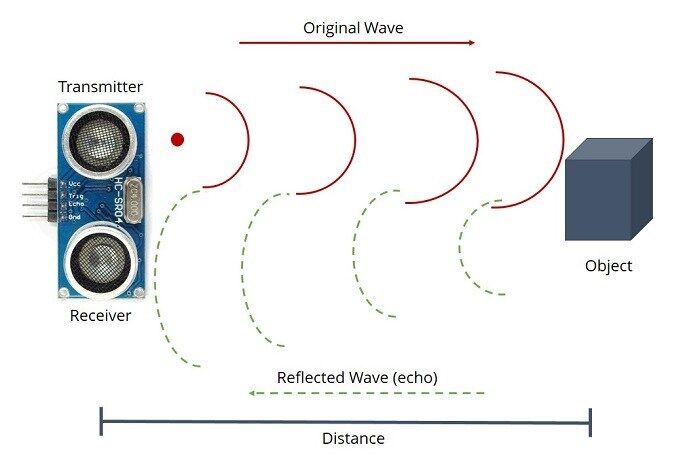
HC-SR04 Ultrasonic Sensor – Working
As shown above theHC-SR04 Ultrasonic (US) sensoris a 4 pin module, whose pin names are Vcc, Trigger, Echo and Ground respectively. This sensor is a very popular sensor used in many applications where measuring distance or sensing objects are required. The module has two eyes like projects in the front which forms the Ultrasonic transmitter and Receiver. The sensor works with the simple high school formula that
Distance = Speed × Time
The Ultrasonic transmitter transmits an ultrasonic wave, this wave travels in air and when it gets objected by any material it gets reflected back toward the sensor this reflected wave is observed by the Ultrasonic receiver module as shown in the picture below

Now, to calculate the distance using the above formulae, we should know the Speed and time. Since we are using the Ultrasonic wave we know the universal speed of US wave at room conditions which is 330m/s. The circuitry inbuilt on the module will calculate the time taken for the US wave to come back and turns on the echo pin high for that same particular amount of time, this way we can also know the time taken. Now simply calculate the distance using a microcontroller or microprocessor.
How to use the HC-SR04 Ultrasonic Sensor:
HC-SR04 distance sensoris commonly used with both microcontroller and microprocessor platforms like Arduino, ARM, PIC, Raspberry Pie etc. The following guide is universally since it has to be followed irrespective of the type of computational device used.
Power the Sensor using a regulated +5V through the Vcc ad Ground pins of the sensor. The current consumed by the sensor is less than 15mA and hence can be directly powered by the on board 5V pins (If available). The Trigger and the Echo pins are both I/O pins and hence they can be connected to I/O pins of the microcontroller. To start the measurement, the trigger pin has to be made high for 10uS and then turned off. This action will trigger an ultrasonic wave at frequency of 40Hz from the transmitter and the receiver will wait for the wave to return. Once the wave is returned after it getting reflected by any object the Echo pin goes high for a particular amount of time which will be equal to the time taken for the wave to return back to the sensor.
The amount of time during which the Echo pin stays high is measured by the MCU/MPU as it gives the information about the time taken for the wave to return back to the Sensor. Using this information the distance is measured as explained in the above heading.
Applications:
- Used to avoid and detect obstacles with robots like biped robot, obstacle avoider robot, path finding robot etc.
- Used to measure the distance within a wide range of 2cm to 400cm
- Can be used to map the objects surrounding the sensor by rotating it
- Depth of certain places like wells, pits etc can be measured since the waves can penetrate through water
Documents:
Package Include:
- 1 x HC-SR04 Ultrasonic Sonar Sensor
- Working Voltage DC 5 V
- Working Current 15mA
- Working Frequency 40Hz
- Max Range 4m
- Min Range 2cm
- Measuring Angle 15 degree
- Trigger Input Signal 10uS TTL pulse
- Echo Output Signal Input TTL lever signal and the range in proportion

Login to ask a question
